Después de 4 meses de trabajo, Pedro y yo pudimos terminar el proyecto del simulador del comportamiento de una colonia de hormigas.
Realmente nunca me había costado tanto trabajo armar un algoritmo (yo solo estuve trabajando en la parte de la lógica de control), al final quedó algo que me agradó bastante, la visualización en Realidad Aumentada está poca madre y le da muchísima vida al simulador.
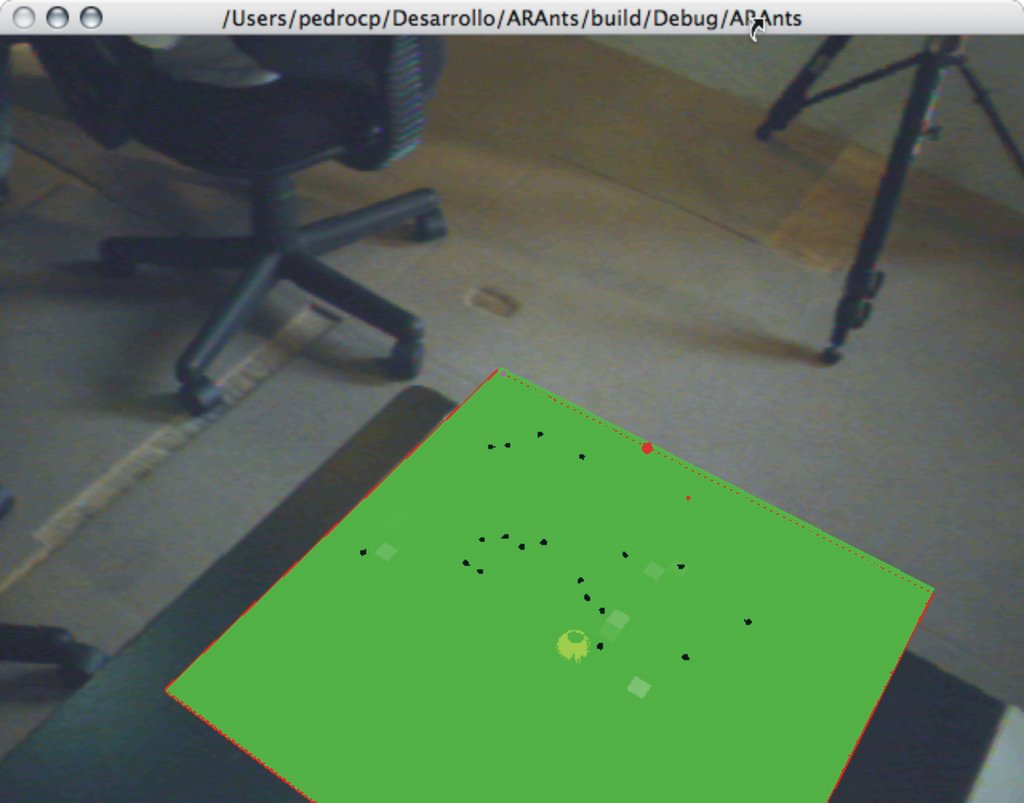
Desafortunadamente no se ven tan espectaculares los screenshots (hay que verlo funcionando en vivo), creo que Pedro se iba a poner a meterle más ondas para que luciera más (entre otras cosas: mejorar la visualización de los rastros de olor y usar el modelo armado por sith para la estructura de las hormigas), de mientras les dejo estos 2 screenshots:

La idea que está detrás de la heurística de funcionamiento está basada en las siguientes reglas planteadas por
Aguirre-Maturana:
- El cerebro de cada hormiga no tiene la capacidad suficiente para recordar la ubicación del nido o de las fuentes de alimento.
- Las hormigas reaccionan ante su entorno secretando olores, los que son depositados en el suelo (rastros de olor).
- Los rastros de olor tienen una duración limitada, desvaneciéndose con el transcurso del tiempo.
- Cuando una hormiga encuentra un determinado rastro de olor de interés, lo intensifica agregándole su propio rastro de olor.
- Las hormigas no pueden 'limpiar' los rastros de olor que encuentran; sólo incrementarlos o ignorarlos.
Bajo estas premisas el reto fue lograr que los agentes buscaran rutas desde el hormiguero hacia la comida y de regreso y que existira la posibilidad de que ellos mismos optimizaran dichas rutas. Hablo de agentes porque se usó un sistema multiagentes, estuvo peliagudo pero al final me gustó mucho el resultado. ¿Qué opinan?